Hi there,
I was waiting for the space structures to work on a general collisions detection and response system (applying to both artificial and celestial objects). Actually this is not a primary feature since in theory the ship should never collide with anything but docking ports. In effect the flight planning routines, flight control system, space traffic controllers and defense platforms should make this impossible.
However being able to fly through planets and stations – however unlikely – is obviously not acceptable! And so implementing the feature was definitely mandatory.
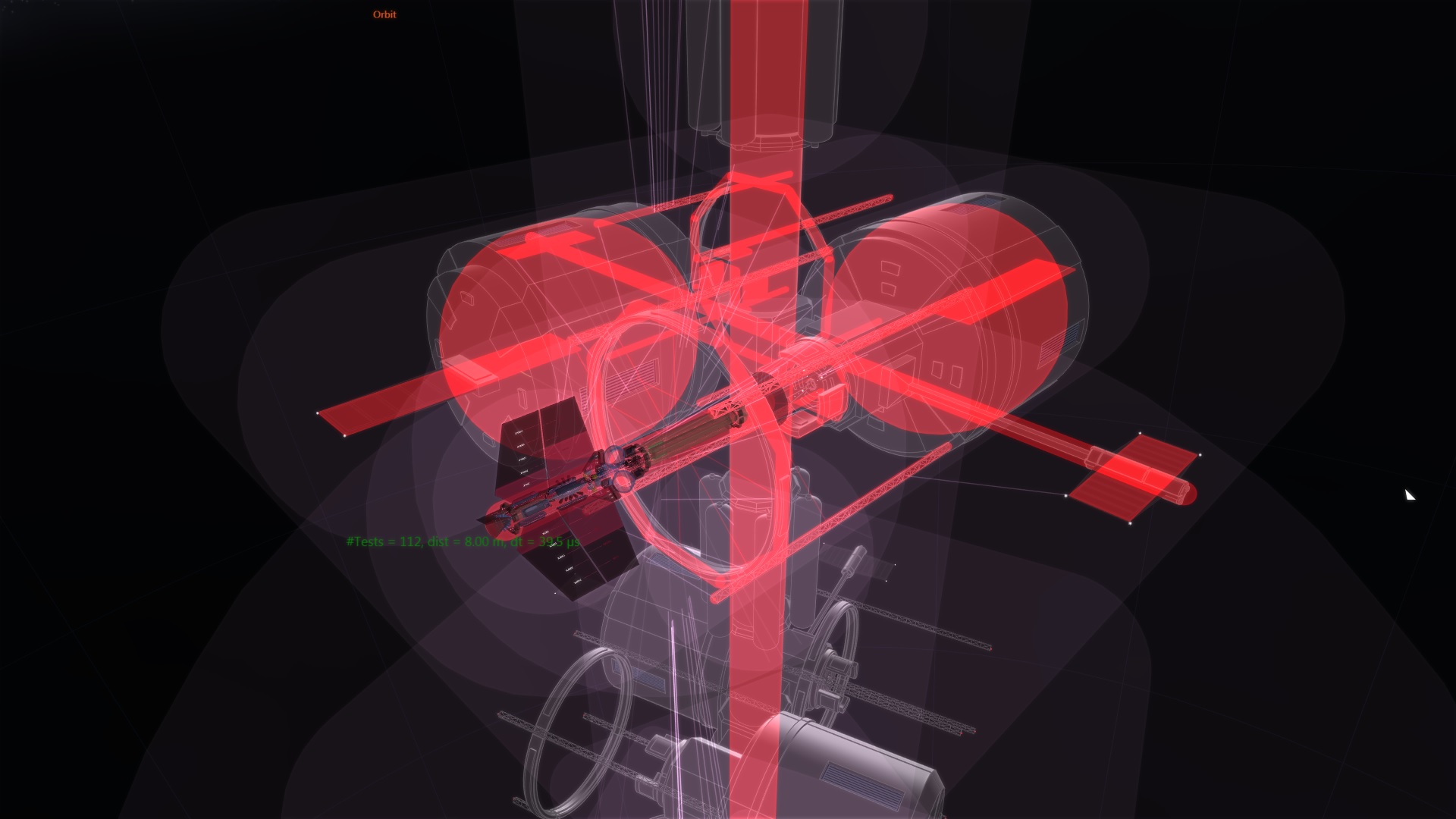
The following video provides an in-game presentation of the system:

