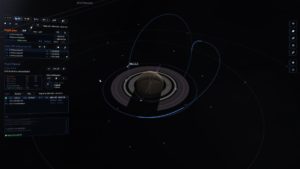
Flight Planner
Its role is to compute the maneuvers, jumps and the resulting trajectory that lead the ship from its departure to its intended destination.
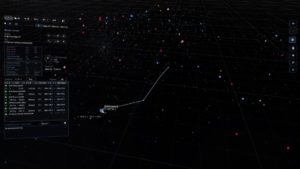
Route Planner
Operates on the galactic map and proposes sequences of flights and refueling stops for long-distance journeys.

Navigation Signal
The ship's location information as processed from the various positioning sensors and the inertial navigation units.