Trajectory propagator and manual planning
The trajectory propagator is the heart of the flight planning routines. Its role is to derive the trajectory and vessel state over time (mass) resulting from a given set of maneuvers, initial conditions and a ship and propulsion model.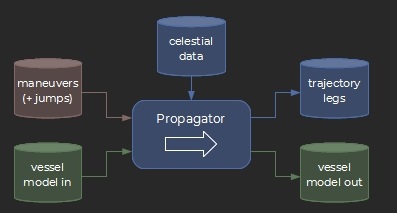
The path legs are computed using two methods:
→ as a conic section when submitted to a single central gravity force
→ through numerical integration in all other cases (i.e. with multiple acting forces), including when the ship is maneuvering, in an atmosphere or close to a star barycenter (3-body model).
A new leg is started at each change of the propagation conditions: starting or stopping the engine, crossing a SOI boundary etc…
Semi-automatic flight planning routines
To spare you the tedious work of manually tuning all maneuvers, the flight planner features some specific routines to automatically manage the most common navigation tasks:
- transfer to a target (with optional rendezvous)
- circularization
- course correction to a jump-point (and jump insertion)
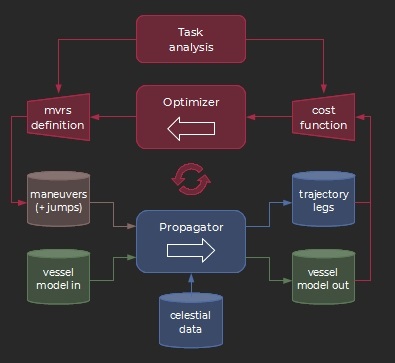
These routines elaborate on the forward propagation model by closing the loop through a numerical optimizer. Typically a maneuver is inserted and its parameters automatically tuned so as to meet the task’s objectives.
The process is iterative and similar in essence to the manual method when trying to achieve some specific results. Besides the automation the main difference is a better management of multivariate searches (gradient based instead of variable per variable).