Navigation Errors
The precision of all positioning sensors is limited and their output can be expressed as:
PNAV = PTRUE + εPNAV where εPNAV is the position error signal.
εPNAV is considered a random signal (i.e. “noise”) although its characteristics are generally closely related to deterministic characteristics from the sensors themselves (systematic delays, processing biases…) or the configuration of the position computation problem (conformation of a satellites’ constellation …).
As such it is quantified using its rms scalar value (root-mean-square) that can be interpreted as a probability. In a rough first approximation the chances that PNAV is within:
- 1 x εPNAV rms of PTRUE = 68%
- 2 x εPNAV rms of PTRUE = 95%
- 3 x εPNAV rms of PTRUE = 99.7%
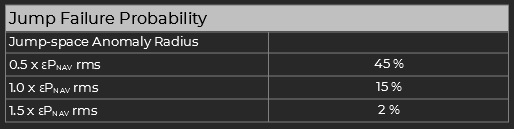
In relation to jumps
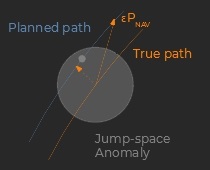
A jump occurs whenever the jump-point enters a correctly modulated anomaly bubble. Therefore a jump may fail if the navigation error is too large.
However the perpendicular component to the flight path is the only one that matters for the particular problem. Statistically this gives a [2/π] multipler on the effective position error for jumps, and the following table:
Velocity error
Over long periods of time the position error remains bounded in relation to εPNAV rms and does not accumulate over time. That is in first approximation εPNAV = constant and therefore its first derivative εVNAV ∼ zero.
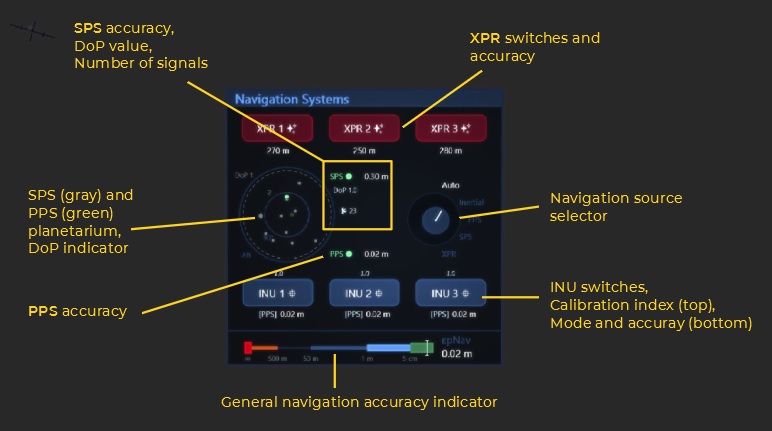
Radio Navigation Aids
The signals from nearby radio navaid emitters constitute the primary source of positioning information. They are received through dedicated comms units slots, and then processed by the comms controller.
Proximity Positioning System (PPS)
- Channel set: SRPS
- Nominal accuracy: 3 cm rms (degrades with range)
- Effective range: 20 km
The PPS system features a set of short-range high-precision navaids that are used around stations during the departure and approach phases. It requires a comms-unit on the SRPS channel set to operate (which can be the same as the one used for the SPS system).
Space Positioning System (SPS)
- Channel set: SRPS / LRPS (see below)
- Nominal accuracy: 30 cm rms (see dilution of precision below)
- Effective range: SRPS ~ 1.3 ls / LRPS ~ 3.0 ls (radio range)

The SPS system (or GPS for Global Positioning System) relies on range measurements to multiple satellites arranged in a constellation. Similarly to the PPS the signals are received by one or several comms-units. A minimum of 3 satellites must be within range for a slightly degraded accuracy, and the nominal performance is achieved with the signals from 4 sources or more (4 signals enable a perfect time synchronization between the ship and the constellation).
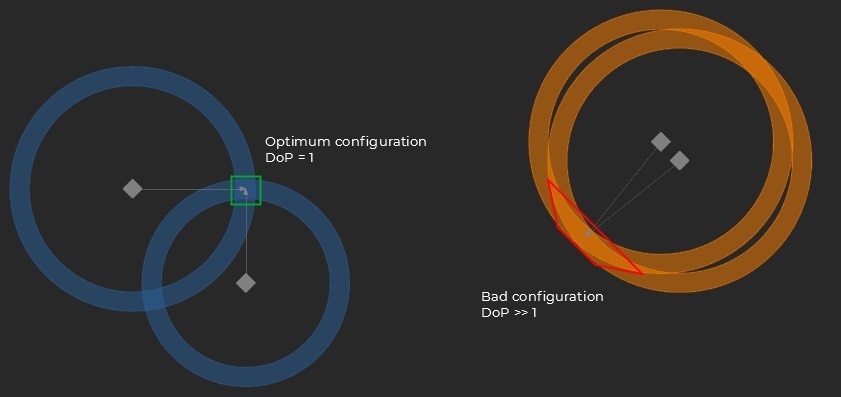
Dilution of Precision
The effective SPS accuracy depends on the conformation of the constellation as seen from the receiver. Intuitively the more “at right angles” the satellites are and the better the accuracy. The phenomenon is called dilution of precision and is expressed as a multiplier on the nominal accuracy: εPNAV,SPS = DoP x [Nominal SPS accuracy]
SRPS / LRPS
SPS signals on the “Short Range” SRPS (UHF, 200 W) and “Long Range” LRPS (SHF, 2 kW) channel sets are compatible.
At equipped terrestrial planets it is generally possible to compute the position using a single comms slot at low gain (many satellites being in range with this setting).
On the other hand the larger distances at gas and ice giants usually require the targeting of individual satellites at high RX gain.

Calibrated INU
A steady blue color and the ⯐ symbol indicate a calibrated INU. The calibration index is featured above the button.

Un-calibrated INU
A blinking blue / amber color and the ⨳ symbol indicate an un-calibrated INU. The calibration index is featured above the button in amber.